Gimbal Control for Vision-based Target Tracking
Article Sidebar
Main Article Content
Abstract
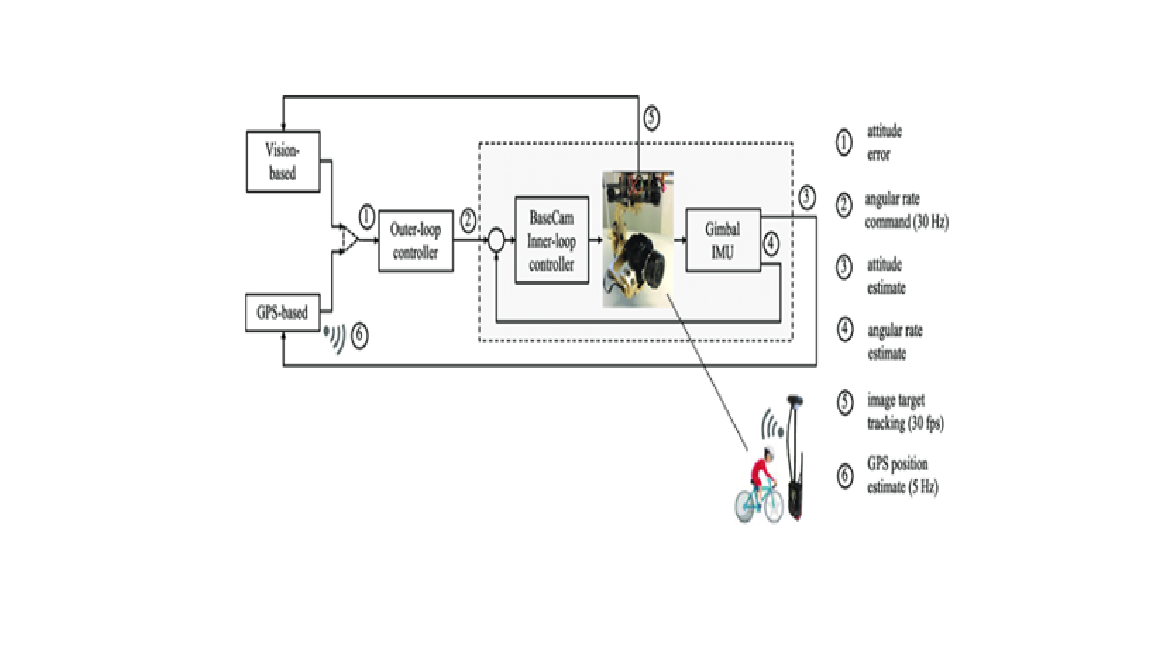
This paper addresses the problem of controlling the orientation of a 3-axis gimbal that is carrying a cinematography camera, using image measurements for feedback. The control objective is to keep a moving target of interest at the center of the image plane. A Region-of-Interest (ROI) that encloses the target’s image is generated through the combination of a visual object detector and a visual object tracker based on Convolutional Neural Networks. The proposed system uses a fast, computationally efficient CNN-based object detector and tracker to generate a Region-of-Interest (ROI) around a moving target, computes the attitude error as a rotation matrix, and employs an attitude controller to ensure the target remains centered in the image plane, with experimental validation demonstrated using a human face.