
AI-Powered Pest Management System
DOI:
https://doi.org/10.65521/intjournalrecadvengtech.v14i1s.266Keywords:
Abstract
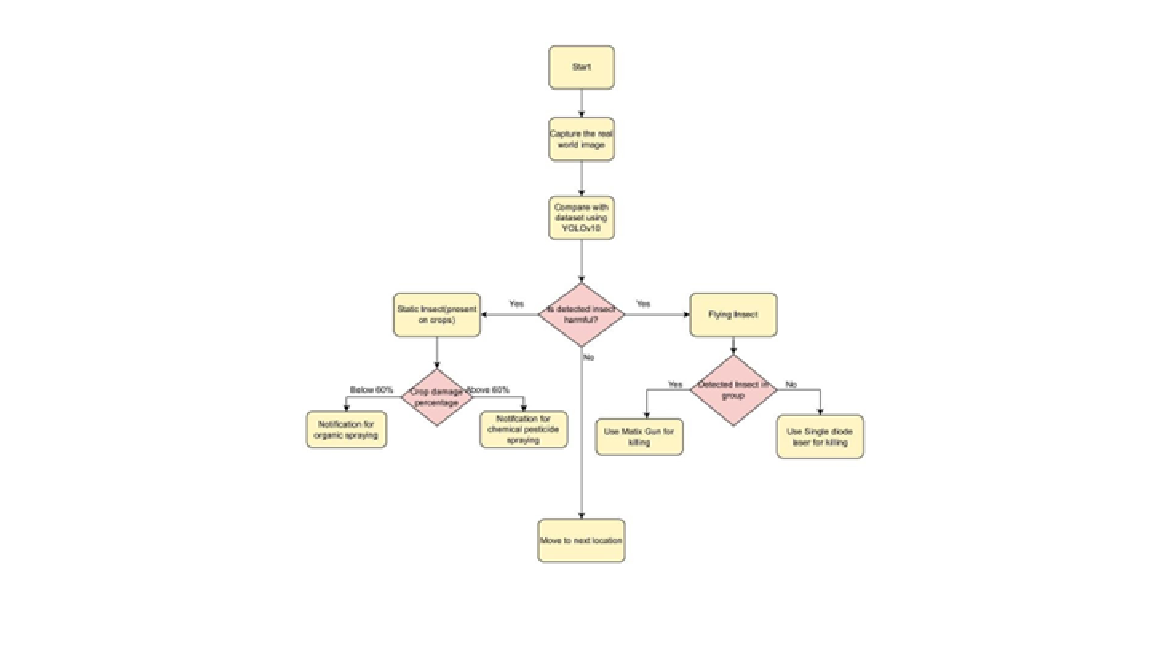
This study develops an autonomous robotic system designed to improve pest monitoring and control in agricultural settings. Conventional approaches, such as manual sticky traps, are often time-consuming and expensive. Our robot utilizes high-resolution cameras and multispectral imaging to monitor crops, collecting pest-related data that is processed using computer vision algorithms. The system relies on the IP102 dataset and the YOLOv10 model to detect harmful insects, distinguishing between stationary and flying species. Targeted pest control measures are then deployed: stationary pests are treated with precise organic or chemical sprays based on the extent of crop damage, while flying insects are eradicated with laser technology—using multi-diode lasers for groups and single-diode lasers for individuals. GPS ensures the robot stays within field boundaries, and a GSM module sends alerts to the farmer. This innovation seeks to reduce pesticide usage, contributing to more sustainable and efficient agricultural practices.
Downloads
Downloads
Published
How to Cite
Issue
Section
License

This work is licensed under a Creative Commons Attribution-NoDerivatives 4.0 International License.