Designing a Smart Obstacle-Avoiding AGV with Mobile Controller for Efficient Line Following Navigation
DOI:
https://doi.org/10.65521/ijeecs.v13i2.5Keywords:
Abstract
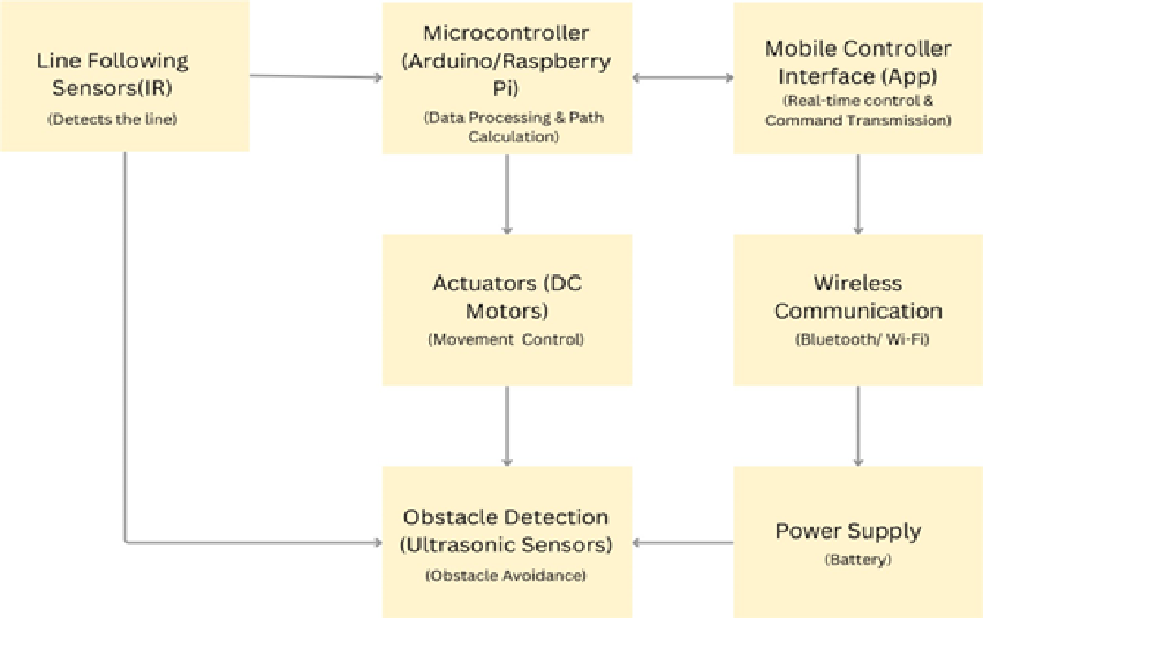
The project focuses on developing an Automated Guided Vehicle (AGV) with dual functionality as an obstacle-avoiding robot and a line-following robot. This versatile robot, powered by an ESP32 Module, is designed to navigate autonomously in various environments. The AGVs utilizes an ultrasonic sensor for real-time obstacle detection, coupled with a buzzer alert system to avoid collisions. A key feature of the AGVs is its mode- switching capability, allowing it to transition between line-following and mobile controller navigation modes. This switching system is controlled via a mobile app, such as Blynk, enabling remote operation and flexibility in navigation. The AGV is engineered to carry a load of up to 5 kg, with a hydraulic system in place for precise load deployment. Upon reaching a designated point during the line-following mode, the system triggers an automatic notification or instant message, ensuring timely updates on the load deployment status. This project is designed to offer an efficient, adaptable, and robust solution for automated material handling in industrial and commercial settings, enhancing operational efficiency and safety.