Autonomous Surface Vehicles with Cooperative Control for Oil Skimming and Cleanup: Design and Evaluation
Article Sidebar
Main Article Content
Abstract
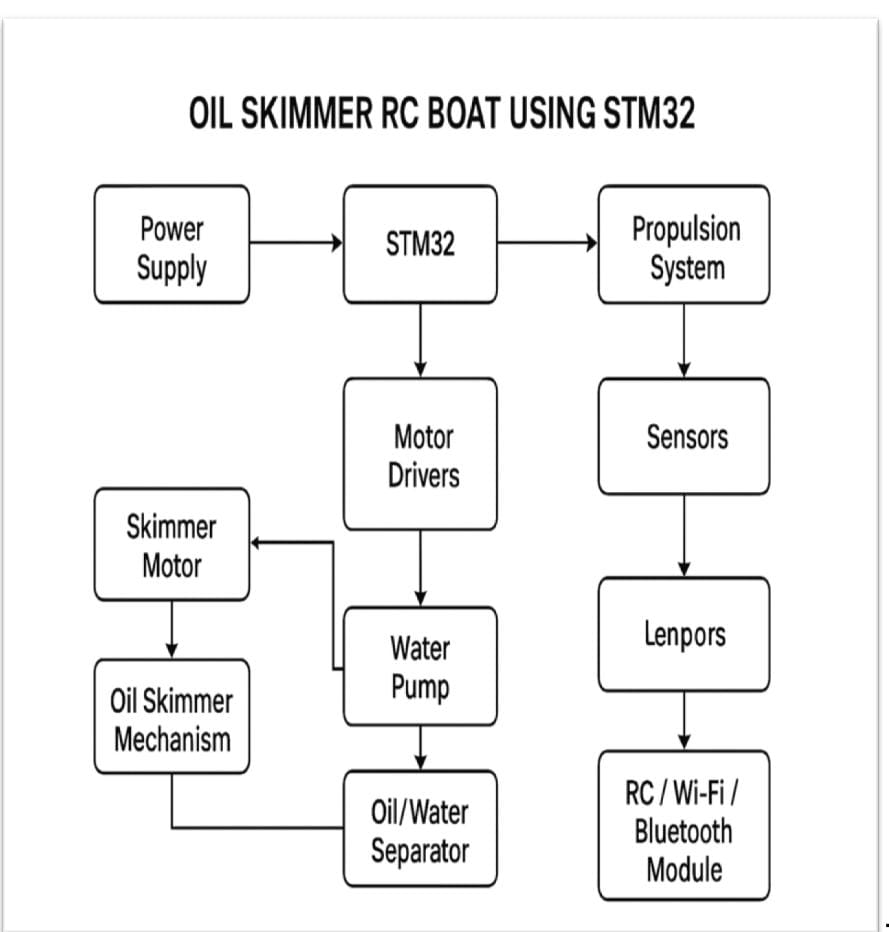
Oil spills and floating waste in water bodies are a major environmental concern that cause serious damage to aquatic ecosystems, marine life, and local economies. Traditional cleanup methods are expensive, labor-intensive, and inefficient for small or localized spills. To address these challenges, this paper presents the design and implementation of a remote-controlled amphibious vehicle capable of operating on both land and water for oil skimming and collection. The vehicle is controlled wirelessly through a PS5 controller connected via Bluetooth using an ESP32 microcontroller, while an STM32F446RE microcontroller manages all real-time motor control, steering, and skimming operations. The system is powered by a 12V Exide XL4 battery and uses a custom-built power distribution circuit for stable voltage regulation. A belt-type oil skimmer is mounted at the front of the vehicle to collect oil effectively from water surfaces. This project provides a cost-effective, human-operated solution that bridges the gap between traditional manual cleanup and complex autonomous surface vehicles (ASVs).