Arduino Based Packaging Robotic Arm
DOI:
https://doi.org/10.65521/ijeecs.v14i1.859Keywords:
Abstract
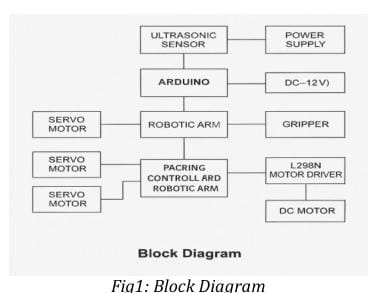
Automation plays a vital role in modern industries by improving efficiency, accuracy, and productivity. This project presents the design and development of a Packing Controlled Robotic Arm using Arduino. The system is designed to perform automated pick-and-place operations for packing applications in small-scale industries. The robotic arm is controlled using Arduino Uno, with servo motors providing movement to each joint and a gripper mechanism handling objects. Ultrasonic sensors are used to detect the presence of items for packing, while Arduino coordinates motion control through pre-programmed instructions. The developed system aims to reduce manual labor, minimize errors, and provide a cost-effective automation solution. The prototype demonstrates the potential of using simple, low-cost components for effective packaging automation in educational and industrial setups.