A Comprehensive Review of Deep Convolutional U-Shape Network with Jump Attention-Based Vision Transformer for Integrated Sequence Scheduling and Trajectory Planning with Obstacle Avoidance in Wireless Rechargeable Sensor Networks
DOI:
https://doi.org/10.65521/ijacte.v14i1.2757Keywords:
Abstract
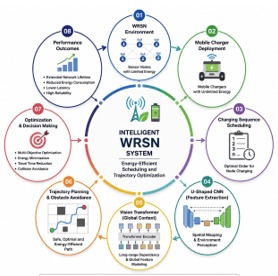
Wireless Rechargeable Sensor Networks (WRSNs) have emerged as a promising solution for overcoming energy constraints in traditional wireless sensor networks by enabling mobile chargers to replenish sensor nodes dynamically. However, efficient sequence scheduling, trajectory planning, and obstacle avoidance remain critical challenges due to the dynamic and resource-constrained nature of such environments. Recently, deep learning approaches—particularly convolutional neural networks (CNNs), U-shaped architectures (U-Net), and Vision Transformers (ViTs)—have demonstrated remarkable performance in modelling complex spatial-temporal dependencies. This paper presents a comprehensive review of deep convolutional U-shape networks integrated with jump attention-based Vision Transformer architectures for optimizing sequence scheduling and trajectory planning in WRSNs. The hybridization of CNN-based feature extraction with transformer-based global attention mechanisms enables improved representation learning and decision-making in dynamic environments. Attention mechanisms such as pyramid squeeze attention and shuffle attention significantly enhance feature selectivity and computational efficiency, while transformer architectures provide long-range dependency modelling critical for trajectory optimization. The study systematically analyses recent advancements, focusing on deep learning-based scheduling, energy optimization, and obstacle avoidance techniques. Furthermore, the review identifies the role of multi-objective optimization and reinforcement learning in improving network lifetime and path efficiency. Existing approaches demonstrate improved accuracy, energy efficiency, and adaptability but still face challenges such as computational overhead, scalability, and real-time deployment constraints.