A Review on Autonomous Navigation Robot Using Map-Based Guidance
DOI:
https://doi.org/10.65521/ijeecs.v14i1.348Keywords:
Abstract
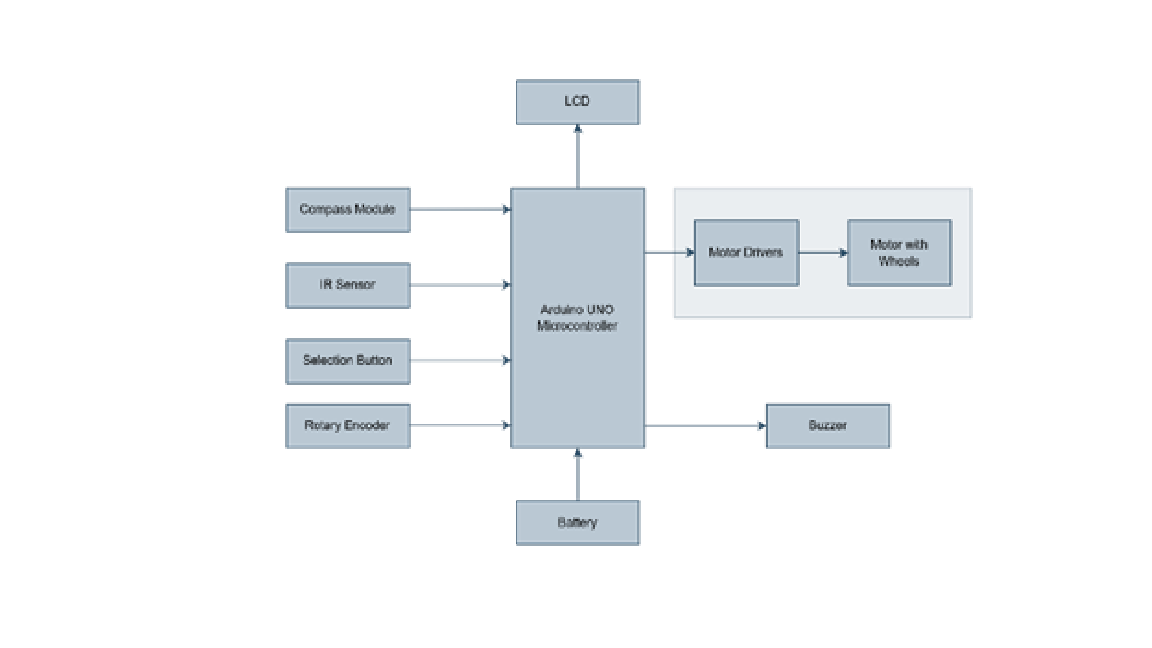
This project presents the development of a Map-Guided Automated Guided Robot (AGV) designed for document delivery within a college campus. The robot is powered by an Arduino Uno microcontroller and integrates key components including IR sensors for obstacle detection, rotary encoders for position tracking, and motor drivers for movement control. The robot autonomously follows a predefined route to transport documents between designated locations on campus, avoiding obstacles and ensuring timely deliveries. The system utilizes an LCD display for destination selection, allowing users to specify delivery points. In the case of obstacle detection, the robot halts and alerts the user through a buzzer. The primary aim of this project is to enhance operational efficiency by automating the document delivery process, reducing the need for manual intervention, and minimizing the risk of delays and human error. The proposed solution offers a scalable, cost-effective method to automate routine tasks within educational institutions, providing a foundation for future advancements in robotics and automation. The integration of simple yet effective navigation algorithms and user interaction mechanisms in this system demonstrates the potential of autonomous vehicles for enhancing administrative workflows in academic environments.